 |
|||||||||||||||||
 |
|||||||||||||||||
 |
|||||||||||||||||
 |
|||||||||||||||||
|
 |
|||
| On
peut maintenant animer ce pantin, en utilisant les différentes
grandes techniques d'animation d'un objet : la cinématique inverse,
et les positions par images clés (ou " Keyframes "),
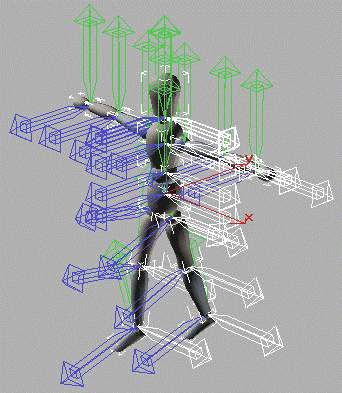
puis le rendu de l'animation. Voilà, à gauche, le pantin que l'on veut animer d'une marche humaine. Pour que l'animation semble réelle, il faut utiliser la cinématique inverse. Ce procédé consiste à définir à cet objet ses possibilités de mouvements ; c'est à dire, par exemple, de ne pas permettre à la tête de se détacher du buste, et de ne lui permettre qu'une rotation de 120°… Mieux encore, lorsque son pied avancera, alors sa jambe l'accompagnera dans son mouvement, tout en restant fixée à son articulation. Pour commencer, il faut placer les axes de rotations (ou référentiels) de chaque objet sur son articulation : Il faut ensuite définir une hiérarchie qui définie les différents membres. En effet, si l'on veut bouger notre main, par exemple, l'avant-bras ne bouge pas nécessairement ; en revanche si l'avant-bras bouge, la main doit obligatoirement bouger. La hiérarchie fonctionne avec des parents et des enfants : la mains et un objet enfant de l'avant bras, qui est son objet parent. On peut donc faire "l'arbre généalogique" de notre pantin. On constate que le parent principal est la taille. (Si la taille bouge, le reste suit). Il faut ensuite définir les degrés de liberté et les limites de chacune de nos liaisons suivant chaque axe de son référentiel local. On obtient, pour le genou, en activant la rotation autour de l'axe X et en la limitant entre 0 et 90° : Ici, l'axe Y et Z ne sont pas activés pour le genou. Une fois tout ces paramètres définis, l'animation devient très facile grâce à la cinématique inverse. Cinématique inverse : Cette technique peut être expliquer simplement de la façon suivante : Dans un mouvement courant, par exemple pointer un objet du doigt, ce ne sont pas les membres parents qui guident le mouvement mais le membre terminal (le doigt dans notre exemple). Les membres parents se positionnent dans l'espace en suivant le doigt et en respectant les limites de nos articulations. On obtient ainsi un mouvement plus réaliste. L'animation en images clés (ou " keyframes ") peut alors débuter.
L'animation à proprement parler peut être réalisée très simplement. On utilise pour cela la notion de keyframe (image clé). On fixe la première et la dernière image d'une animation et on laisse l'ordinateur interpoler les images intermédiaires. Les keyframes sont donc des images origines ou finales définies par l'animateur. Toute la difficulté réside dans un choix correct des keyframes. Pour avoir une animation réaliste, il faut souvent choisir une image située au milieu du mouvement (keyframe intermédiaire). Il existe deux principaux types de keyframes : en position bien sûr, et en rotation, qui fixent la position et l'orientation d'un objet par rapport au référentiel absolu. Un autre point important est la barre d'animation, qui permet de repérer l'image sur laquelle on travaille mais également de visualiser les keyframes liées à l'objet en cours de sélection. Sur la figure ci-dessous, on peut voir que l'on se trouve à l'image 10 (ici l'animation compte 100 images). Les ronds représentent les keyframes liées à l'objet sélectionné.
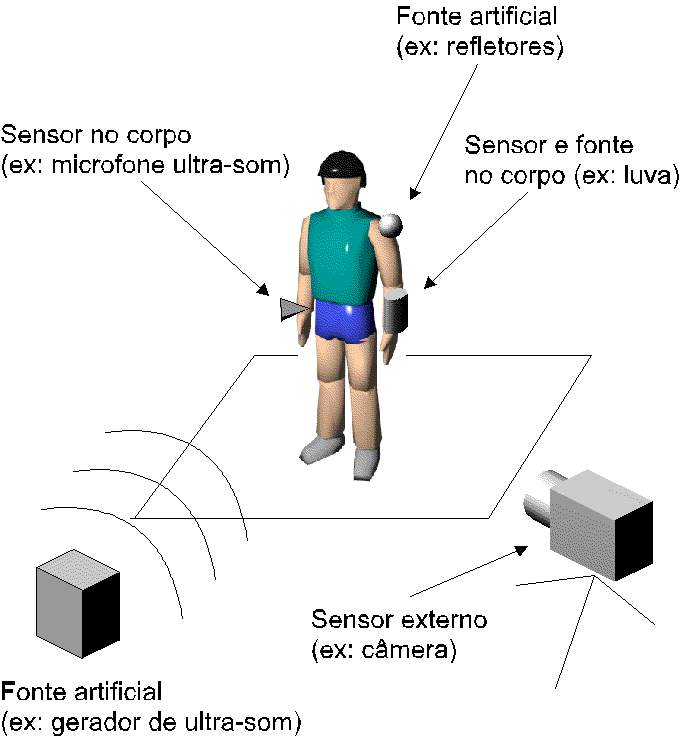
La capture de mouvement obéit à un principe simple d'animation. Des capteurs placés sur le corps (acteurs, objets, marionnettes) envoient à un ordinateur les coordonnées spatiales de ce corps. Ces coordonnées s'affichent comme un ensemble de points. En les reliant par un trait, on obtient un graphique qui se meut en temps réel, conformément au corps qui les pilote. L'utilisation de ces techniques dans les chantiers technologiques est centrale. Elles s'adressent à un public de générations différentes allant des enfants aux personnes âgées. Elles amènent une compréhension des mouvements dans l'espace au plan individuel et collectif (cognition spatiale). Elles permettent la saisie de mouvements d'animaux ou de jongleurs (cirque), Elles proposent la conception de chorégraphies nouvelles, d'animation de marionnettes virtuelles à partir des mouvement réels ou de réaliser des jeux interactifs de groupe… Elles peuvent à un stade plus évolué, proposer une introduction aux nouvelles formes d'animation des images en trois dimensions comme par exemple celle de personnages modélisés numériquement actionnés par des gestes réels. La capture de mouvement offre un réel accès aux machines en développant l'interactivité et la participation inventive du corps. Ces activités expérimentales facilitent les relations avec les outils informatiques en reliant la réalité et la virtualité. 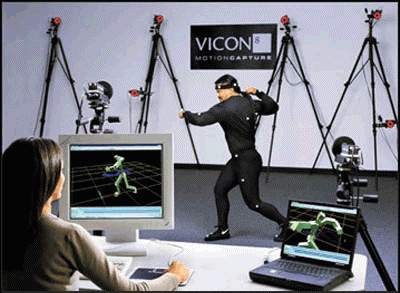
 |








TPE 2001/2002 - Lycée JB Delambre (Amiens)
Stéphane SCHULZE - Clément
LEMAIRE - Jean MONET